Trailblazing R&D: robots with a sensitive touch
Smart robots are capable of perceiving and responding to their surroundings. For this purpose, they require sensors that simultaneously detect various stimuli. Researchers at the Karlsruhe Institute of Technology (KIT) have developed multimodal sensors that respond to motion and touch and thus provide the ideal complement to conventional optical systems.
Robots can relieve humans of monotonous, arduous and hazardous tasks. Which is why they have established themselves in all sectors of the economy – from industrial production and maintenance to logistics and agriculture. By definition, a smart robot can perceive and respond to its surroundings. This awareness enables it to perform complex operations – for example, gripping unfamiliar objects and interacting flexibly and safely with humans. To this end, the robot requires sensors that deliver information about its immediate surroundings. In the same way that the human brain processes sensory information derived from various sources, a smart robot must be in a position to simultaneously detect and evaluate various occurrences. This is where multimodal sensors come into play. Stationary and mobile robots are often equipped with cameras (2D and 3D) and laser scanners. However, the accuracy of such optical systems can be compromised by adverse lighting conditions and hidden objects. Researchers working at the Institute for Anthropomatics and Robotics (IAR) – Intelligent Process Automation and Robotics Lab (IPR) at the Karlsruhe Institute of Technology (KIT) have developed new sensors that augment conventional optical systems.
Sensors simultaneously detect motion and touch
In most cases, the sensors fitted to robot arms and grippers are restricted to a single function. They detect objects based on either proximity or pressure. The “capacitive tactile proximity sensors” developed by KIT unite both functions simultaneously.
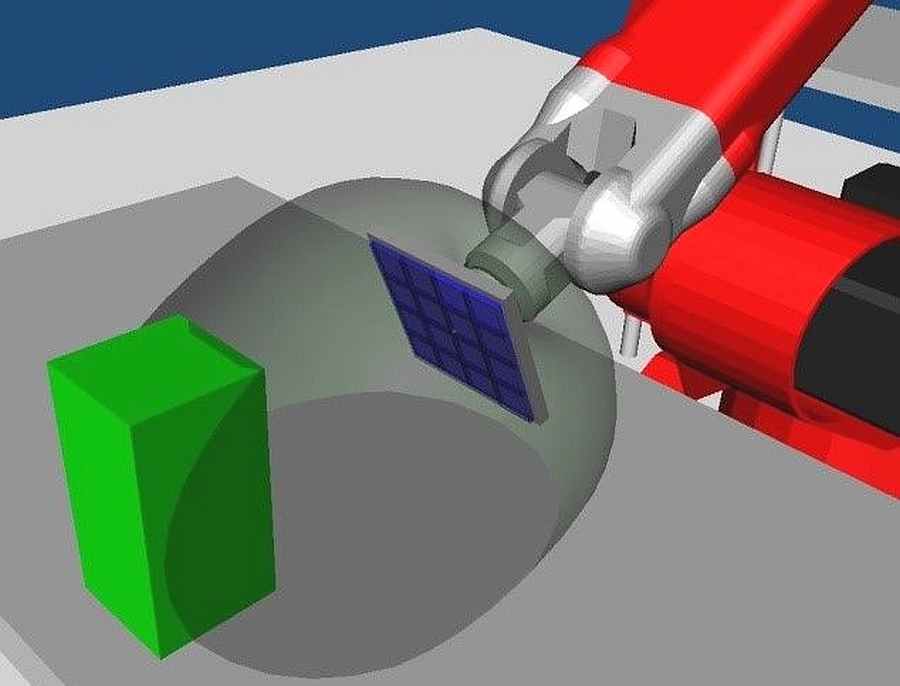
Each sensor module is divided into three layers. The bottom layer consists of a flat electrode. The intermediate layer is made of a compressible insulating material, for example, foamed plastic. The top layer consists of several geometrically arranged electrodes. The number and shape of these electrodes vary according to the specific application. The electronic control unit is separate from the sensor module. The modules can be deployed individually or as part of an interconnected sensor system.
When an object approaches the robot, it alters the electric field surrounding the sensor. The sensor uses this effect to detect the motion and proximity of the object. The mechanical compression of the intermediate layer leads to a change in the electrical capacitance between the electrodes. In this way, the sensor is able to derive tactile information.
Compromise between range and spatial resolution
“The electrodes in the top layer can be freely combined,” explains Dr. Björn Hein, Head of the Intelligent Industrial Robots Group (IIROB) at KIT. “This allows us to achieve a compromise between the range and spatial resolution of the sensors.”
The modules can be combined to create sensor areas of varying sizes – small surfaces for grippers, large surfaces for a complete robot “skin”.
Capacitive tactile proximity sensors significantly enhance the flexibility and agility of automated industrial production. In addition, they improve the safety of human-machine interaction by detecting and localizing approaching persons and emitting a warning signal as soon as they cross a predefined safety limit. In such cases, the robot slows down or stops completely. This makes a major contribution to effective human-robot collaboration in cases where humans and robots are working on the same component.
KIT will demonstrate the potential of its capacitive tactile proximity sensors at HANNOVER MESSE 2018 (23 to 27 April) under the umbrella of the “Research & Technology” show (Hall 2, Stand B16). In addition, KIT will be exhibiting at “Energy” (Hall 27, Stand K51) and various themed displays.